
Toda prótesis artificial activa necesita una fuente de energía de donde tomar su fuerza; un sistema de transmisión de esta fuerza; un sistema de mando o acción y un dispositivo prensor. En la elección de las prótesis a utilizar desempeña un papel trascendental el nivel de amputación o el tipo de displasia de que se trate.
Las prótesis de propulsión asistida se utilizan cuando el paciente no tiene la fuerza necesaria para manejar una prótesis de propulsión muscular o cuando la energía necesaria para su manejo no guarde relación con la función desempeñada por la prótesis.
Prótesis cosméticas. Son denominadas también prótesis pasivas, dado que solo cubren el aspecto estético, de donde toman su nombre. Para las prótesis cosméticas se emplean de manera recurrente tres materiales: PVC rígido, látex flexible o silicona. Estos materiales se caracterizan por ser más livianos y requieren menos mantenimiento porque tienen menos piezas móviles que otras opciones protésicas.
Prótesis Mecánicas. Las manos mecánicas son dispositivos que se utilizan con la función de apertura o cierre voluntario por medio de un arnés el cual se sujeta alrededor de los hombros, parte del pecho y parte del brazo controlado por el usuario. Su funcionamiento se basa en la extensión de una liga por medio del arnés para su apertura o cierre, y el cierre o apertura se efectúa solo con la relajación del músculo respectivamente gracias a un resorte y tener una fuerza de presión ó pellizco. Estos elementos se recubren con un guante para dar una apariencia más estética, sin embargo se limita al agarre de objetos relativamente grandes y redondos ya que el guante estorba al querer sujetar objetos pequeños. Los elementos constitutivos de una prótesis mecánica se muestran en la figura 1.
El tamaño de la prótesis y el número de ligas que se requiera dependiendo de la fuerza y el material para su fabricación varían de acuerdo a las necesidades de cada persona. Dado que estas prótesis son accionadas por el cuerpo, es necesario que el usuario posea al menos un movimiento general de: expansión del pecho, depresión y elevación del hombro, abducción y aducción escapular y flexión glenohumeral.
Prótesis Eléctricas. Estas prótesis usan motores eléctricos en el dispositivo terminal, muñeca o codo con una batería recargable. Éstas prótesis se controlan de varias formas, ya sea con un servocontrol, control con botón pulsador o botón con interruptor de arnés. En ciertas ocasiones se combinan éstas formas para su mejor funcionalidad.
Se usa un socket que es un dispositivo intermedio entre la prótesis y el muñón logrando la suspensión de éste por una succión. Es más costosa su adquisición y reparación, existiendo otras desventajas evidentes como son el cuidado a la exposición de un medio húmedo y el peso de la prótesis.
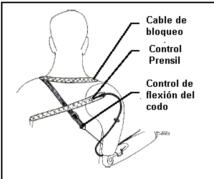
Figura 1 Mecanismo de funcionamiento de una prótesis mecánica
Prótesis neumáticas. Estas prótesis eran accionadas por ácido carbónico comprimido, que proporcionaba una gran cantidad de energía, aunque también presentaba como inconveniente la complicación de sus aparatos accesorios y del riesgo del uso del ácido carbónico.
Prótesis Mioeléctricas. Las prótesis mioeléctricas son prótesis eléctricas controladas por medio de un poder externo mioeléctrico, estas prótesis son hoy en día el tipo de miembro artificial con más alto grado de rehabilitación. La configuración básica se muestra en la figura 2. Sintetizan el mejor aspecto estético, tienen gran fuerza y velocidad de prensión, así como muchas posibilidades de combinación y ampliación.
El control mioeléctrico es probablemente el esquema de control más popular. Se basa en el concepto de que siempre que un músculo en el cuerpo se contrae o se flexiona, se produce una pequeña señal eléctrica (EMG) que es creada por la interacción química en el cuerpo. Esta señal es muy pequeña (5 a 20 μV) Un micro-voltio es una millonésima parte de un voltio. Para poner esto en perspectiva, una bombilla eléctrica típica usa 110 a 120 voltios, de forma que esta señal es un millón de veces más pequeña que la electricidad requerida para alimentar una bombilla eléctrica.
El uso de sensores llamados electrodos que entran en contacto con la superficie de la piel permite registrar la señal EMG. Una vez registrada, esta señal se amplifica y es procesada después por un controlador que conmuta los motores encendiéndolos y apagándolos en la mano, la muñeca o el codo para producir movimiento y funcionalidad
Éste tipo de prótesis tiene la ventaja de que sólo requieren que el usuario flexione sus músculos para operarla, a diferencia de las prótesis accionadas por el cuerpo que requieren el movimiento general del cuerpo. Una prótesis controlada en forma mioeléctrica también elimina el arnés de suspensión usando una de las dos siguientes técnicas de suspensión: bloqueo de tejidos blandos-esqueleto o succión1. Tienen como desventaja que usan un sistema de batería que requiere mantenimiento para su recarga, descarga, desecharla y reemplazarla eventualmente. Debido al peso del sistema de batería y de los motores eléctricos, las prótesis accionadas por electricidad tienden a ser más pesadas que otras opciones protésicas. Una prótesis accionada por electricidad proporciona un mayor nivel de tecnología, pero a un mayor costo.
Prótesis Híbridas. Una prótesis híbrida combina la acción del cuerpo con el accionamiento por electricidad en una sola prótesis. En su gran mayoría, las prótesis híbridas sirven para individuos que tienen amputaciones o deficiencias transhumerales (arriba del codo) Las prótesis híbridas utilizan con frecuencia un codo accionado por el cuerpo y un dispositivo terminal controlado en forma mioeléctrica (gancho o mano).
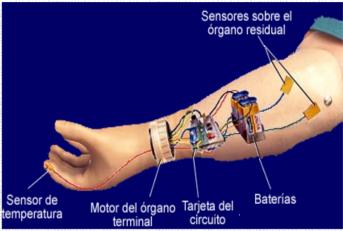
Figura 2. Diagrama de prótesis mioeléctrica
TENDENCIAS EN EL DISEÑO DE PRÓTESIS.
Tomando en cuenta lo rápido que avanza la tecnología en el mundo y en especial la mecatrónica, se espera un avance mayor en las prótesis en la precisión y la fuerza en la prensión además de su conjunción, mayor capacidad de respuesta y estabilidad en el control.
También se estima que el acceso a las prótesis que cuentan con mayor tecnología será mayor en poblaciones con menores posibilidades económicas, esto debido primero a la expansión en el conocimiento y manejo de la tecnología empleada para las prótesis. Segundo porque, actualmente se están realizando estudios a materiales tales como polímeros electroactivos, para poder disminuir el costo en las transmisiones y generación de movimiento para las prótesis.
![]()